Key Proposal Figures
The following figures are extracted from the RoboSAPIENS project proposal, illustrating the core architecture, methodology, and work package structure.
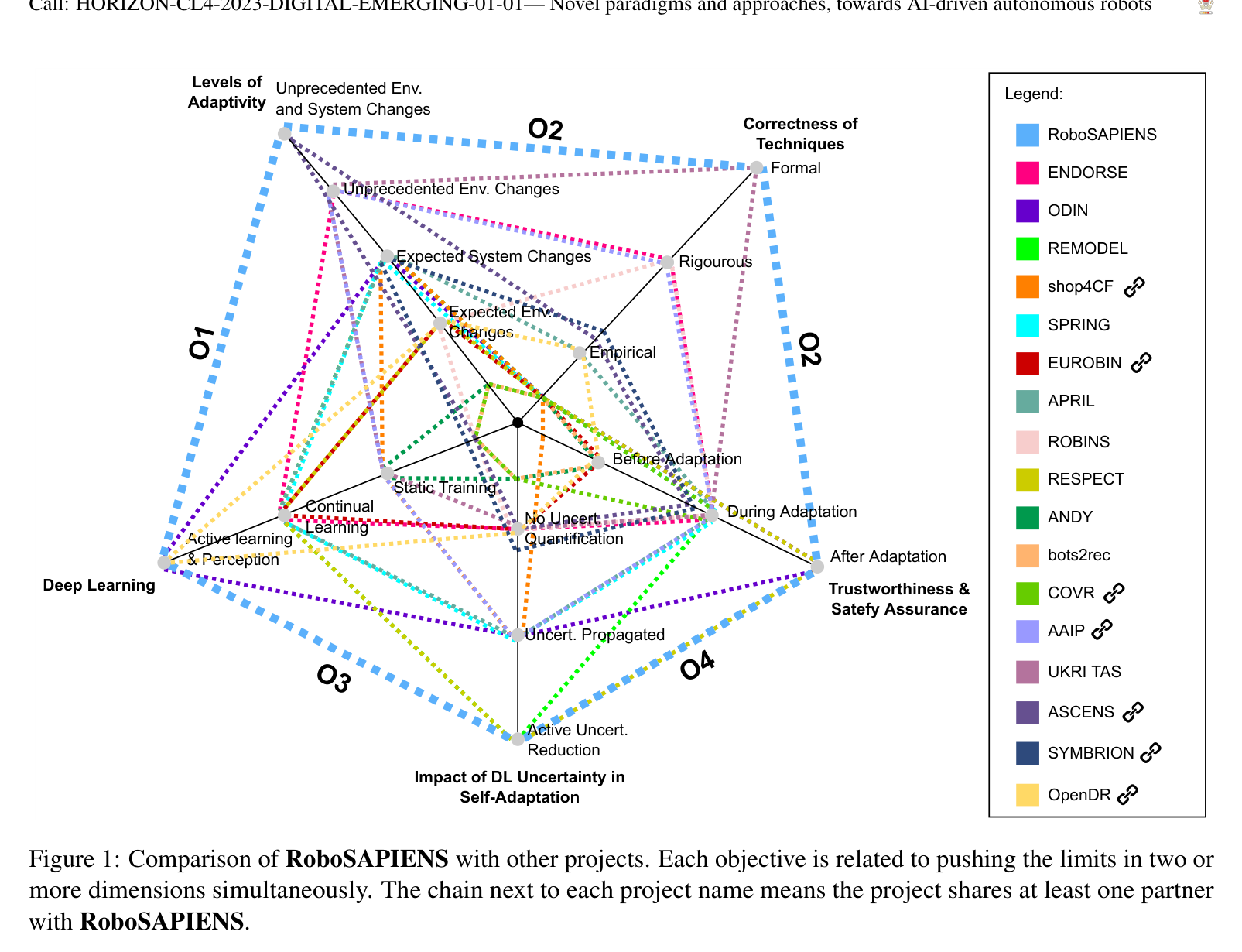
Figure 1: RoboSAPIENS vs. Related Projects
Comparison across five dimensions: Trustworthiness & Safety Assurance, Levels of Adaptivity, Correctness of Techniques, Deep Learning, and Active Uncertainty Reduction. Each objective pushes limits in two or more dimensions simultaneously.
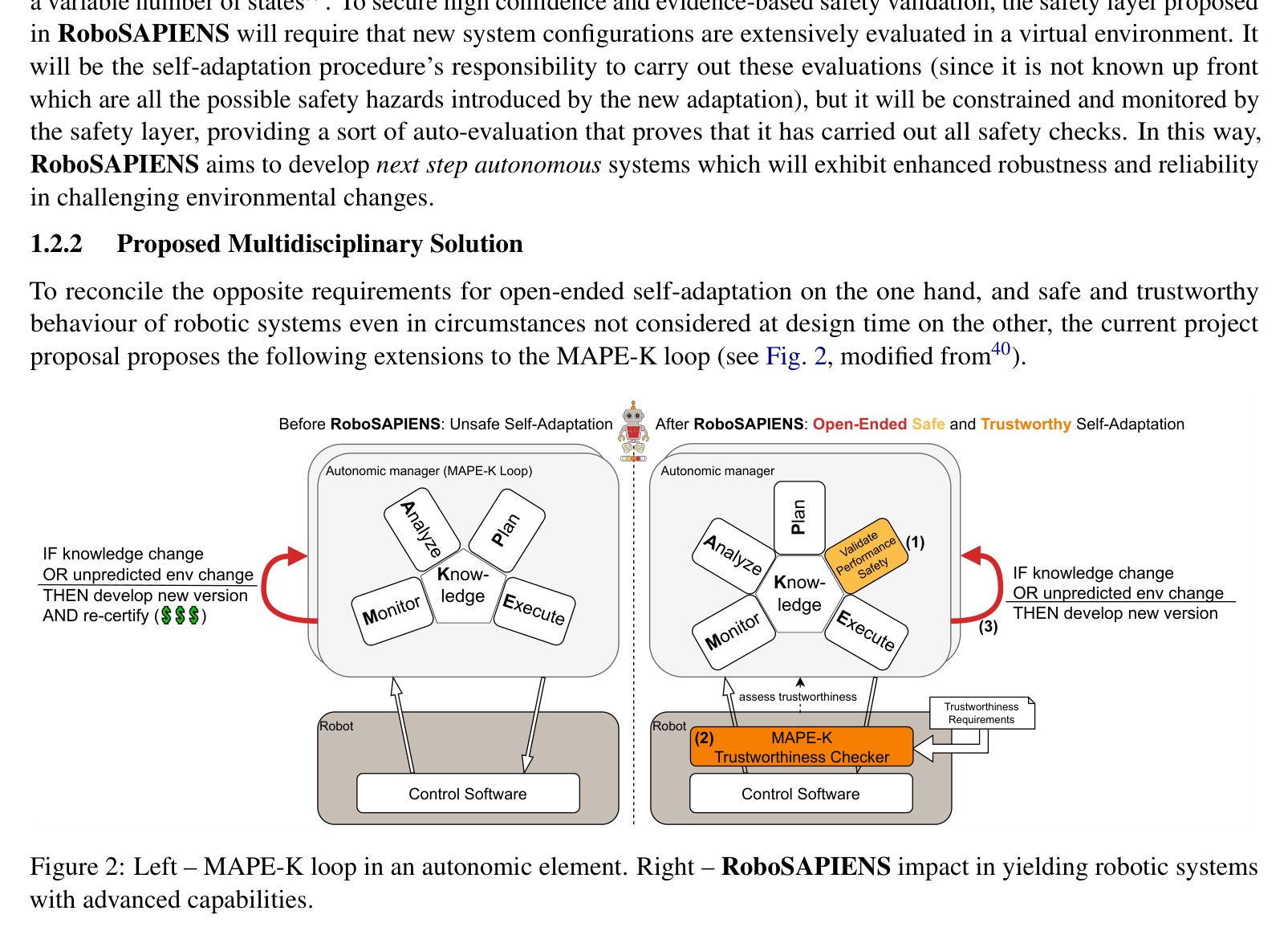
Figure 2: MAPE-K Loop — Before & After RoboSAPIENS
Left: traditional unsafe MAPE-K self-adaptation. Right: RoboSAPIENS adds a Validate Safety & Performance function and a MAPE-K Trustworthiness Checker for open-ended safe and trustworthy self-adaptation.
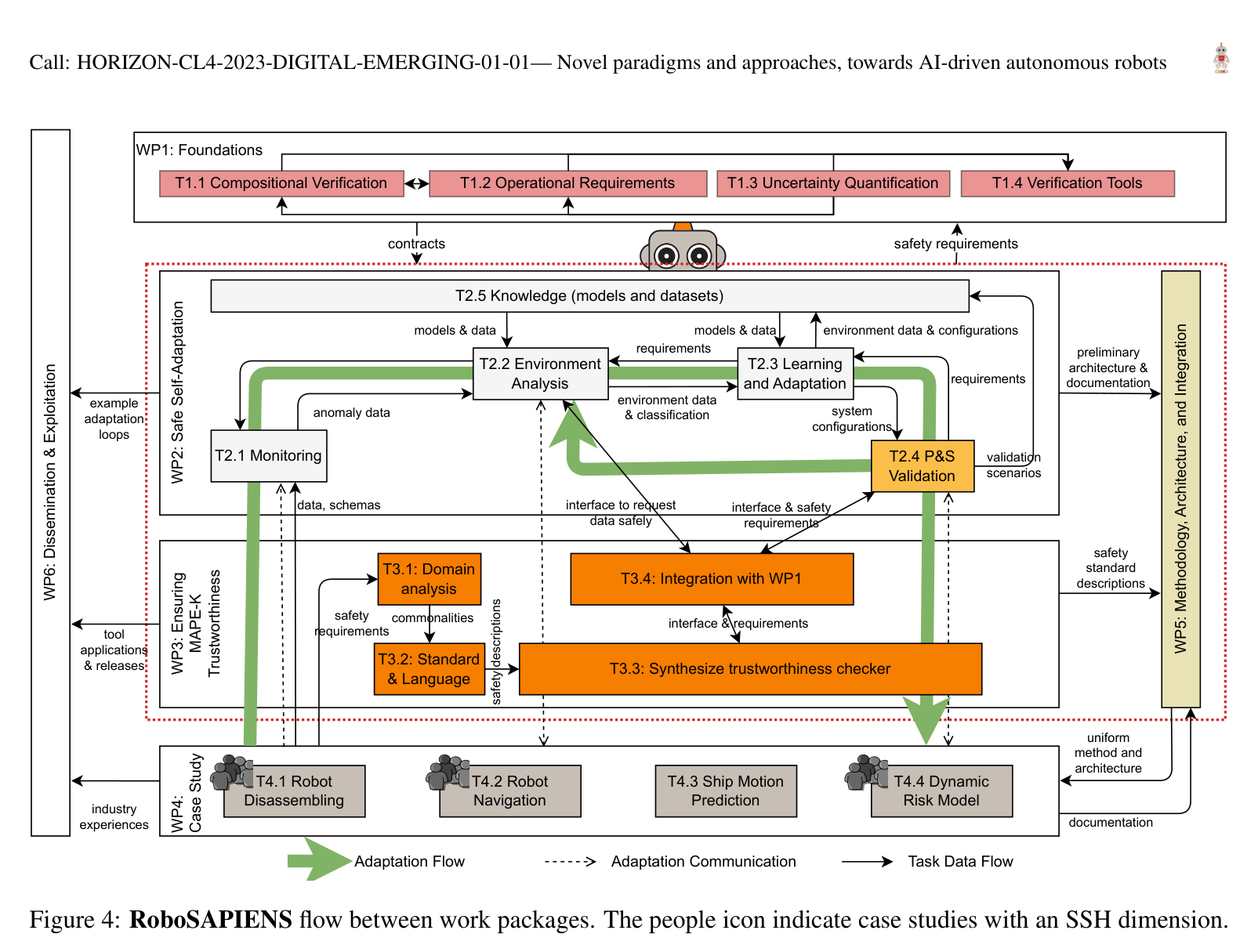
Figure 4: Work Package Flow
Data and adaptation flow between WP1 (Foundations), WP2 (Safe Self-Adaptation), WP3 (Trustworthiness), WP4 (Case Studies), WP5 (Architecture), WP6 (Dissemination), and WP7 (Management).
NTNU Responsibilities and Objectives
In RoboSAPIENS, NTNU (Norwegian University of Science and Technology) leads WP4: Industrial Case Studies and contributes to multiple work packages with expertise in digital twins, co-simulation, and maritime systems.
- WP4 lead (Case Studies): Lead the industrial case studies work package, coordinating four diverse use cases across remanufacturing, fleet management, ship motion prediction, and dynamic risk modelling.
- Ship Motion Prediction case study (T4.3): Investigate transfer learning for ship motion prediction using the Gunnerus research vessel, combining dynamic models with limited real data for safe autonomous navigation.
- WP2 contribution: Develop dynamics-driven system monitoring and uncertainty assessment for the MAPE-K self-adaptation loop.
- WP3 contribution: Support domain analysis and trustworthiness checker development for maritime applications.
- WP5 contribution: Contribute to MAPE-K loop deployment and RoboSAPIENS platform architecture.
- Education & training: Integrate RoboSAPIENS results into courses on Digital Twin Technology, Advanced Simulation and Analysis of Maritime Operations, Real-time AI for Robotics, and Applied AI and Control.